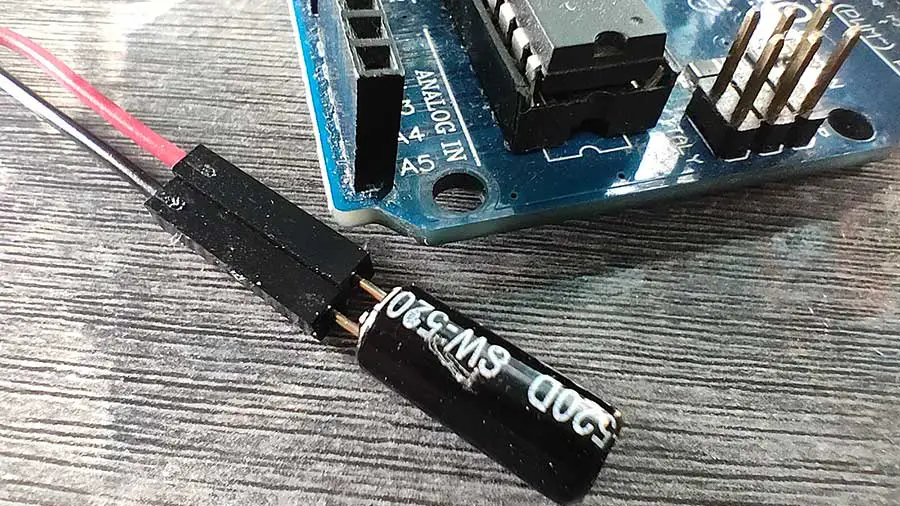
Tilt sensors are inexpensive and easy to use. They are also sometimes called tilt or ball switches. They can detect if an object is upright or tilted at a certain angle. To connect it to an Arduino board, you just need to add one 10Kohm resistor. The tilt sensor has no fixed positive or negative side. You simply choose which one will be your positive and which one will be your negative side. Here are three Arduino projects to get you started with the tilt sensor.
For the projects listed in this article, I will be using the SW-520 tilt sensor.
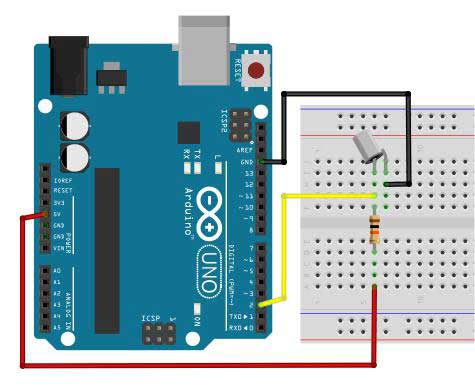
PROJECT 1: Tilt Sensor Value
This project prints a 1 or 0 on the Serial Monitor to check if the tilt sensor is working.
Materials:
1 Arduino Microcontroller
1 Tilt Switch
1 10Kohm resistor
Breadboard Diagram
Arduino Sketch:
//Read the value of a tilt sensor
int tiltsensor = 2;
void setup()
{
pinMode(tiltsensor, INPUT);
//initialize communication at 9600 bits per second
Serial.begin(9600);
}
void loop()
{
//print the value on the serial monitor
//Go to Tools->Serial Monitor to see the values
Serial.println(digitalRead(tiltsensor));
delay(100);
}
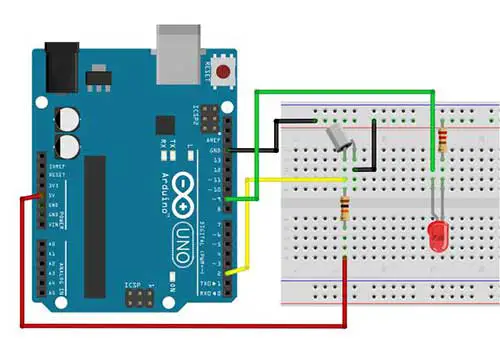
PROJECT 2: Tilt Sensor with 1 LED
This project turns on an LED if the sensor is tilted and turns it off when it is upright.
Materials:
1 Arduino Microcontroller
1 Tilt Switch
1 10Kohm resistor
1 LED
1 220-ohm resistor
Breadboard Diagram
Arduino Sketch
int tiltsensor = 2;
int led=9;
void setup()
{
pinMode(tiltsensor, INPUT);
pinMode(led,OUTPUT);
}
void loop()
{
if (digitalRead(tiltsensor) == 1){
digitalWrite(led,HIGH);
}
else{
digitalWrite(led,LOW);
}
//add delay for stability
delay(100);
}
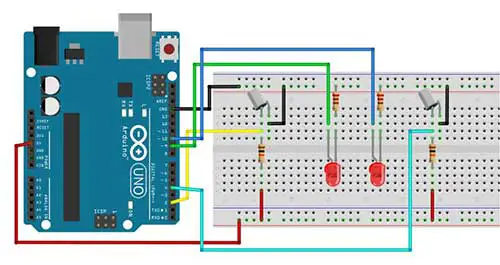
PROJECT 3: 2 Tilt Sensor 2 LEDs
This project performs the following behavior:
|
CONDITION |
OUTPUT |
||
|
Tilt Sensor 1 |
Tilt Sensor 2 |
LED 1 |
LED 2 |
|
TILTED |
TILTED |
ON |
ON |
|
TILTED |
NOT TILTED |
ON |
OFF |
|
NOT TILTED |
TILTED |
OFF |
ON |
|
NOT TILTED |
NOT TILTED |
OFF |
OFF |
This project uses the AND operator. To know more about Relational and Conditional Operators, click this link.
Materials
1 Arduino Microcontroller
2 Tilt Switches
2 10Kohm resistors
2 LED
2 220-ohm resistor
Breadboard
Arduino Sketch
int tiltsensor_1 = 2;
int tiltsensor_2 = 4;
int led_1=9;
int led_2=10;
void setup()
{
pinMode(tiltsensor_1, INPUT);
pinMode(tiltsensor_2, INPUT);
pinMode(led_1, OUTPUT);
pinMode(led_2, OUTPUT);
}
void loop()
{
if (digitalRead(tiltsensor_1)==1 && digitalRead(tiltsensor_2)== 1){
digitalWrite(led_1,HIGH);
digitalWrite(led_2,HIGH);
}
else if (digitalRead(tiltsensor_1)==1 && digitalRead(tiltsensor_2)== 0){
digitalWrite(led_1,HIGH);
digitalWrite(led_2,LOW);
}
else if (digitalRead(tiltsensor_1)==0 && digitalRead(tiltsensor_2)== 1){
digitalWrite(led_1,LOW);
digitalWrite(led_2,HIGH);
}
else if (digitalRead(tiltsensor_1)==0 && digitalRead(tiltsensor_2)== 0){
digitalWrite(led_1,LOW);
digitalWrite(led_2,LOW);
}
//add delay for stability
delay(100);
}









